Allzweck-Asynchron-Elektromotoren AO2, AOL2. Asynchroner AC-Elektromotor AO-Elektromotor 2 81 4
allgemeine Informationen
Für den Antrieb sind Asynchronmotoren der Typen AO41-4 und AO41-6 vorgesehen verschiedene Mechanismen.
Symbolstruktur
AO41-X U2:
AO – asynchron, belüftet, geschlossen;
4 - Motorgröße;
1 - bedingte Länge des Statorpakets;
X - Anzahl der Pole (4; 6);
U2 - Klimaversion und Unterkunftskategorie nach GOST
15150-69 und GOST 15543.1-89.
Nutzungsbedingungen
Höhe über dem Meeresspiegel nicht mehr als 1000 m.
Bei Aufstellung des Motors in einer Höhe über 1000 m reduziert sich die Nennleistung entsprechend dem Koeffizienten K (Tabelle 1).
Tabelle 1
| Höhe über dem Meeresspiegel, m | 1000 | 1500 | 2000 | 2500 | 3000 | 3500 | 4000 |
| Faktor K | 1 | 0,98 | 0,95 | 0,92 | 0,88 | 0,84 | 0,8 |
Temperatur Umfeld von minus 45 bis 40°C.
Relative Luftfeuchtigkeit bis zu 80 % bei einer Temperatur von 20 °C.
Die Kühlluft enthält keine brennbaren oder explosiven Verunreinigungen.
Gehalt an korrosiven Stoffen in der Atmosphäre gemäß Typ II GOST 15150-69.
Die Staubkonzentration in der Umwelt beträgt bis zu 10 mg/m3.
Gruppe von Betriebsbedingungen in Bezug auf die Einwirkung mechanischer Faktoren M1 gemäß GOST 17516.1-90.
Motoren müssen vor direkter Einwirkung geschützt werden Sonneneinstrahlung und atmosphärischer Niederschlag.
Sicherheitsanforderungen gemäß GOST 12.2.007.0-75 und GOST 12.2.007.1-75.
Die Motoren erfüllen die Anforderungen der TU IBN.050. 380.
TU IBN.050.380
Die wichtigsten technischen Daten sind in der Tabelle aufgeführt. 2.
Tabelle 2
| Parametername | Parameterwert für Typen | |
| AO41-4 | AO41-6 | |
| Nennleistung, kW | 1,7 | 1,0 |
| Netzwerkfrequenz, Hz | 50 | |
| Nennspannung, V | 220/380 | |
| Bemessungsstrom 1), A | 6,7/3,9 | 4,8/2,8 |
| Drehzahl, min -1 | 1500 | 1000 |
| 81,5 | 77 | |
| 0,82 | 0,72 | |
| Schlupf, % | 5,4 | 7 |
| Ich fange an /ich nom | 5,0 | 6,0 |
| M Start /M nom | 1,8 | 1,3 |
| M max/M nom | 2,0 | 1,8 |
| Trägheitsmoment des Rotors, kg m 2 | 0,044 | |
| Gewicht, kg, Ausführungen: | ||
| 32 | ||
| 36 | ||
1) Die im Zähler angegebenen Stromwerte entsprechen einer Spannung von 220 V, im Nenner einer Spannung von 380 V.
Kontinuierlicher Betriebsmodus (S1) gemäß GOST 183-74.
Der Schutzgrad von Motoren vor Umwelteinflüssen beträgt IP44 gemäß GOST 17494-87.
Methode zur Kühlung von Motoren 1С01 gemäß GOST 20459-87.
Wärmebeständigkeitsklasse der Statorwicklungsisolierung A gemäß GOST 8865-93.
Der Vibrationspegel entspricht der Klasse 4,5 gemäß GOST 16921-83.
Der Geräuschpegel überschreitet nicht Grenzwerte gemäß Klasse I GOST 16372-84.
Isolationswiderstand der Motorwicklungen gegenüber dem Gehäuse und zwischen den Phasen bei Betriebstemperatur nicht weniger als 1 MOhm.
Durchschnittliche Ressource bis zu Überholung- 30.000 Std.
Durchschnittliche Zeit zwischen Ausfällen – 23.000 Stunden.
Frist Lagerung - 3 Jahre.
Garantiezeit- 2 Jahre ab Inbetriebnahme der Motoren bei einer Betriebsdauer von 10.000 Stunden.
Ausführung nach der Installationsmethode IМ1001 und IМ2001 gemäß GOST 2479-79.
Der Stator des Elektromotors besteht aus einem Gusseisenrahmen, einem Kern aus Elektroblechblechen und einer einlagigen losen Wicklung, die in halbgeschlossenen Nuten verlegt ist.
Der Rotor besteht aus einem auf einer Welle montierten Kern und einer kurzgeschlossenen Wicklung aus Aluminiumguss.
Lagerschilde und -abdeckungen sind aus Aluminiumguss.
Elektromotoren werden auf N306-Kugellagern hergestellt; Der Außenring eines der Lager ist nicht befestigt. Das Lagerschmiermittel ist gleichmäßig.
Ausgabegerät, Ausführung K-1 (ohne Klemmenkasten mit freien Ausgabeenden).
Gesamteinbau- und Anschlussmaße der Motoren sind in Abb. dargestellt. 1, 2.
Gesamtansicht, Gesamt-, Einbau- und Anschlussmaße der Elektromotoren der Typen AO41-4 und AO41-6, Ausführung IM1001

Gesamtansicht, Gesamt-, Einbau- und Anschlussmaße der Elektromotoren der Typen AO41-4 und AO41-6, Version IM2001 v
Im Lieferumfang enthalten: Motor mit Schlüssel und Reisepass, technische Beschreibung und Bedienungsanleitung.
Dreiphasige asynchrone Elektromotoren der Serie AO2-9 sind für den Antrieb verschiedener Mechanismen in stationären Anlagen und für den Betrieb als Antrieb von Mechanismen auf Schiffen mit unbegrenztem Navigationsbereich ausgelegt Notfallausrüstung. Für den Bedarf gefertigt Volkswirtschaft sowie für die Bedürfnisse der russischen Marine mit den See- und Flussschifffahrtsregistern der Russischen Föderation. Auch Drehstrom-Asynchron-Elektromotoren der Baureihe AO2-9 werden gemäß den Anforderungen der behördlichen und technischen Dokumentation für Kernkraftwerke hergestellt.
Bezeichnung der Motorgröße:
A - Asynchronmotor mit Käfigläufer;
O – belüftet, geschlossen;
2 - Seriennummer der Serie;
9 - Seriennummer der Abmessung (Höhe der Drehachse beträgt 280 mm);
1,2 - Symbol Statorkernlänge;
0 - Sonderversion mit reduzierter Leistung;
4, 6, 8, 10 - Anzahl der Pole;
A – Sonderausführung mit Rosatom-Abnahme
U, OM - Klimaversion nach GOST 15150;
3, 4 - Platzierungskategorie nach GOST 15543-70.
Design und Installationsmethode: IM 1001, IM 1002, IM 2001, IM2002, IM 3011 (gemäß GOST 2479-79). Auf Kundenwunsch werden Motoren mit einer anderen Einbauart gefertigt.
Klimaversion- gemäßigtes, allgemeines Meeresklima (U, OM) gemäß GOST 15150.
Schutzart vor Umwelteinflüssen IP 44 gemäß GOST 17494.
Betriebsart- Langzeit S1 gemäß GOST 183-74 (für allgemeine Industrieanwendungen) und S1 gemäß GOST R 52776 (für Versionen mit Rosatom-Abnahme und Schiffsversionen).
Sicherheitsklasse- 2N nach NP-001 (zur Ausführung mit Rosatom-Abnahme).
Erdbebenwiderstandskategorie- I nach NP-031 (zur Ausführung mit Rosatom-Abnahme).
Berechnete Erdbebenstärke- 9 Punkte auf der MSK-64-Skala (für Ausführung mit Rosatom-Abnahme).
Stromart- abwechselnd dreiphasig.
Aktuelle Frequenz- 50 und 60 Hz.
Stromspannung- 220/380 V oder 380 V. Auf Kundenwunsch ist es möglich, Motoren für andere Spannungen herzustellen.
Drehrichtung- beliebig.
Zulässige Betriebshöhe*- 1000 m über dem Meeresspiegel.
Gruppe von Betriebsbedingungen:
M1 nach GOST 17516.1-90 (für den allgemeinen industriellen Einsatz),
M6 nach GOST 17516.1 (für Version mit Rosatom-Abnahme),
M46 nach GOST 17516 (zur Schiffsausführung).
Methode zur Motorkühlung- IC01 gemäß GOST 20459-87 (für allgemeine industrielle Ausführung) und IC0141 gemäß GOST 20459 (für Ausführung mit Rosatom-Abnahme).
Hitzebeständigkeitsklasse Statorwicklungsisolierung nicht niedriger als B gemäß GOST 8865-87 (für allgemeine Industrieausführung) und H gemäß GOST 8865 (für Schiffsausführung).
Geräuschpegel Motoren dürfen die Grenzwerte nicht überschreiten:
gemäß Klasse 3 nach GOST 16372-84 (für den allgemeinen industriellen Einsatz),
gemäß Klasse 1 nach GOST 16372-84 (zur Ausführung mit Rosatom-Abnahme),
Tabelle Nr. 1 GOST R 53148 (für Schiffsausführung).
*Beim Einbau des Motors über 1000m muss die Nennleistung des Motors entsprechend den Vorgaben reduziert werden.
Preis des AC-Asynchron-Elektromotors AO2-92-4у3: verhandelbar in Rubel. mit Mehrwertsteuer
Unser Unternehmen führt komplexe Lieferungen von asynchronen Wechselstrom-Elektromotoren ab Lager und auf Bestellung zu Händlerpreisen durch. Lieferung an jeden Ort Transportunternehmen, auf Wunsch des Kunden.
Tabelle 1
Hauptmerkmale
| Motortyp | N, | U, V | Frequenz | Ich, A | H, % | N. U/min | M, kg | IP |
| kW | Strom, Hz | |||||||
| AO2-92-4 | 100 | 220/380 | 50,6 | 306/177 | 93 | 1500 | 635 | IP 44 |
N – Leistung, kW
U – Spannung, V
I – Aktuell, A
h – Effizienz, %
n – Drehzahl, U/min
M – Gewicht, kg
IP – Schutzart GOST 17494-87
Reis. 1 GerätAC-Asynchron-Elektromotor AO2-92-4у3
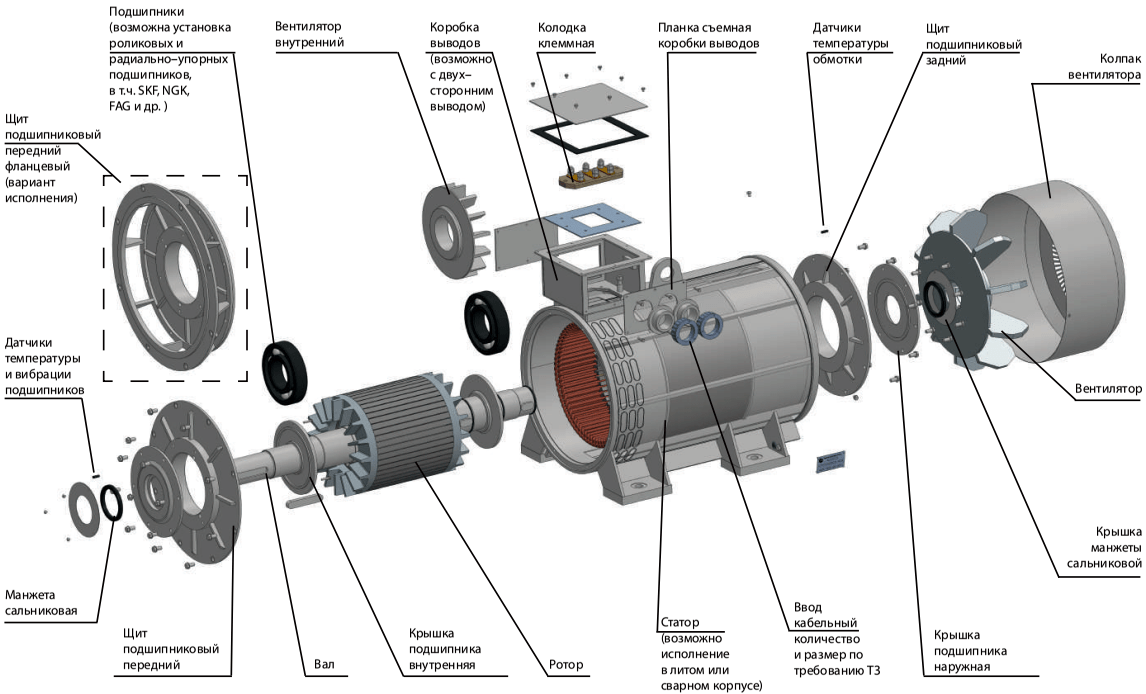
Tabelle 2
AC-Asynchron-Elektromotor AO2-92-4у3
ICH BIN.1001-1081 Paw-Hinrichtung
| Typ | L, | l1, | l2, | l10, | l11, | l30, | l3, | l33, | B, | b1, | b2 | b10, |
| mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | |
| AO2-92-4 | 1167 | 140 | 140 | 419 | 510 | 1025 | 190 | 540 | 547 | 20 | 18 | 457 |
| Typ | b20, | b30, | H, | h1 | h2 | h5, | h6, | h31, | h34, | d1, | d2, | d10, |
| mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | |
| AO2-92-4 | 358 | 684 | 280 | 12 | 12 | 74,5 | 64 | 622 | 552 | 70 | 60 | 22 |
Reis. 2 Gesamt-, Einbau- und Anschlussmaße
AC-Asynchron-Elektromotor AO2-92-4у3
ICH BIN.1001-1081 Paw-Hinrichtung

Tabelle 3
Gesamt-, Einbau- und Anschlussmaße
AC-Asynchron-Elektromotor AO2-92-4у3
ICH BIN.2001–2081 Kombiversion
| Typ | L, | l1, | l2, | l3, | l10, | l11, | l30, | l33, | l31, | B, | b1, | b2, | b10, | b20, | b30, |
| mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | |
| AO2-92-4 | 1167 | 140 | 142 | 399.5 | 419 | 510 | 1025 | 190 | 540 | 547 | 20 | 18 | 457 | 358 | 684 |
| Typ | H, | h1 | h2 | h5, | h6, | h31, | h34, | d1, | d2, | d10, | d24, | d20, | d25, | nxd22 | - |
| mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | |||
| AO2-92-4 | 280 | 12 | 11 | 74.5 | 64 | 622 | 552 | 70 | 60 | 22 | 225 | 500 | 275 | 8x18 | - |
Reis. 3Gesamt-, Einbau- und Anschlussmaße
AC-Asynchron-Elektromotor AO2-92-4у3
ICH BIN.2001–2081 Kombiversion

Tabelle 4
Gesamt-, Einbau- und Anschlussmaße
AC-Asynchron-Elektromotor AO2-92-4у3
ICH BIN.
| Typ | L, | l1, | l31, | B, | b1, | b10, | b20, | b30, | H, | h1 | h5, | d1, | d25, | d20, | d24, | nxd22 |
| mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | ||
| AO2-92-4 | 1025 | 140 | 539,5 | 584 | 20 | 660 | 358 | 684 | 292 | 12 | 74,5 | 70 | 225 | 500 | 275 | 8x18 |
Reis. 4 Gesamt-, Einbau- und Anschlussmaße
AC-Asynchron-Elektromotor AO2-92-4у3
ICH BIN.3001 -3081 Versionsflansch
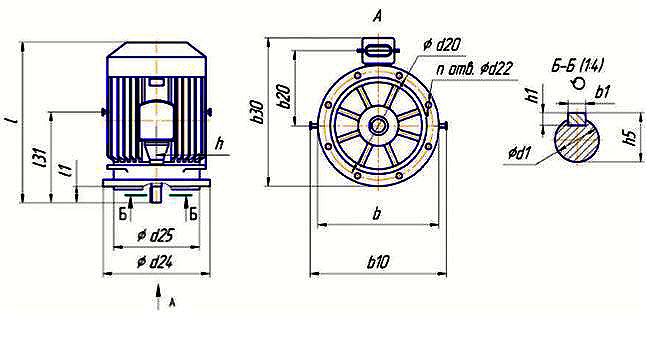
Tabelle 5
Gesamt-, Einbau- und Anschlussmaße
AC-Asynchron-Elektromotor AO2-92-4у3
ICH BIN.
| Typ | L, | l1, | l2, | l3, | l10, | l11, | l30, | l31, | l33, | B, | b1, | b2, | b10, |
| mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | |
| AO2-92-4 | 1167 | 140 | 142 | 400 | 419 | 510 | 1025 | 190 | 540 | 547 | 20 | 18 | 457 |
| AO2-92-4 | 1167 | 140 | 142 | 400 | 419 | 510 | 1025 | 190 | 540 | 547 | 20 | 18 | 457 |
| Typ | b20, | b30, | H, | h1 | h2 | h5, | h6, | h31, | h34, | d1, | d2, | d10, | - |
| mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | ||
| AO2-92-4 | 358 | 683 | 280 | 12 | 11 | 74,5 | 64 | 622 | 552 | 70 | 60 | 24 | - |
| AO2-92-4 | 358 | 683 | 280 | 12 | 11 | 74,5 | 64 | 622 | 552 | 70 | 60 | 24 | - |
Reis. 5Gesamt-, Einbau- und Anschlussmaße
AC-Asynchron-Elektromotor AO2-92-4у3
ICH BIN.1001-1081 Version Multi-Speed-Pfoten

ZWECK UND ANWENDUNG
AC-Asynchron-Elektromotor AO2-92-4u3
Der dreiphasige asynchrone Elektromotor AO2-92-4u3 ist für den Antrieb verschiedener Mechanismen in stationären Anlagen und für den Betrieb als Mechanismusantrieb auf Schiffen mit unbegrenztem Navigationsbereich, mit Ausnahme von Notfallausrüstung, ausgelegt. Hergestellt für die Bedürfnisse der Volkswirtschaft, der russischen Marine mit den See- und Flussschifffahrtsregistern der Russischen Föderation.
Der dreiphasige Asynchron-Elektromotor AO2-92-4u3 wird ebenfalls gemäß den Anforderungen der behördlichen und technischen Dokumentation für Kernkraftwerke hergestellt.
Design des asynchronen Wechselstrommotors AO2-92-4у3
Design und Installationsmethode: IM 1001, IM 1002, IM 2001, IM2002, IM 3011 (gemäß GOST 2479 – 79). Auf Kundenwunsch werden Motoren mit einer anderen Einbauart gefertigt.
Klimaversion– gemäßigtes, allgemeines Meeresklima (U, OM) gemäß GOST 15150.
Schutzgrad vor Umwelteinflüssen IP 44 gemäß GOST 17494-87.
Betriebsart– Langzeit S1 gemäß GOST 183-74 (für allgemeine Industrieanwendungen) und S1 gemäß GOST R 52776 (für Versionen mit Rosatom-Abnahme und Schiffsversionen).
Sicherheitsklasse– 2N nach NP-001 (zur Ausführung mit Rosatom-Abnahme).
Berechnete Erdbebenstärke– 9 Punkte auf der MSK-64-Skala (für Ausführung mit Rosatom-Abnahme).
Stromart– abwechselnd dreiphasig.
Aktuelle Frequenz– 50 und 60 Hz.
Stromspannung– 220/380V oder 380V Auf Kundenwunsch ist es möglich, Motoren für andere Spannungen herzustellen.
Drehrichtung- beliebig.
Zulässige Betriebshöhe*– 1000 m über dem Meeresspiegel.
Gruppe „Betriebsbedingungen“.
M1 gemäß GOST 17516.1–90 (für den allgemeinen industriellen Einsatz)
M6 nach GOST 17516.1 (für Version mit Rosatom-Abnahme)
M46 nach GOST 17516 (zur Schiffsausführung).
Methode zur Motorkühlung– IC01 gemäß GOST 20459–87 (für allgemeines Industriedesign) und IC0141 gemäß GOST 20459 (für Design mit Rosatom-Akzeptanz).
Hitzebeständigkeitsklasse der Statorwicklungsisolierung nicht niedriger als B gemäß GOST 8865–87 (für den allgemeinen industriellen Einsatz) und H gemäß GOST 8865 (für den Einsatz auf Schiffen).
Geräuschpegel Motoren sollten die Grenzwerte nicht überschreiten: gemäß Klasse 3 gemäß GOST 16372–84 (für allgemeine industrielle Ausführung), gemäß Klasse 1 gemäß GOST 16372–84 (für Ausführung mit Rosatom-Abnahme), Tabelle Nr. 1 von GOST R 53148 (für Marineausführung) .
*Beim Einbau des Motors über 1000m muss die Nennleistung des Motors entsprechend den Vorgaben reduziert werden.
Legende
AC-Asynchron-Elektromotor AO2-92-4u3
A – Asynchronmotor mit Käfigläufer;
O – belüftet, geschlossen;
2 – Seriennummer der Serie;
92 – Seriennummer der Abmessung (Höhe der Drehachse beträgt 280 mm);
1, 2 – Symbol für die Länge des Statorkerns;
0 – Sonderversion mit reduzierter Leistung;
4, 6, 8, 10 – Anzahl der Pole;
A – Sonderausführung mit Rosatom-Abnahme
Preis des AC-Asynchron-Elektromotors AO2-91-6у3: verhandelbar in Rubel. mit Mehrwertsteuer
Unser Unternehmen führt komplexe Lieferungen von asynchronen Wechselstrom-Elektromotoren ab Lager und auf Bestellung zu Händlerpreisen durch. Lieferung an den Standort durch ein beliebiges Transportunternehmen auf Wunsch des Kunden.
Tabelle 1
Hauptmerkmale
| Motortyp | N, | U, V | Frequenz | Ich, A | H, % | N. U/min | M, kg | IP |
| kW | Strom, Hz | |||||||
| AO2-91-6 | 55 | 220/380 | 50,6 | 177/102 | 92,5 | 1000 | 520 | IP 44 |
N – Leistung, kW
U – Spannung, V
I – Aktuell, A
h – Effizienz, %
n – Drehzahl, U/min
M – Gewicht, kg
IP – Schutzart GOST 17494-87
Reis. 1 GerätAC-Asynchron-Elektromotor AO2-91-6u3
Tabelle 2
AC-Asynchron-Elektromotor AO2-91-6u3
ICH BIN.1001-1081 Paw-Hinrichtung
| Typ | L, | l1, | l2, | l10, | l11, | l30, | l3, | l33, | B, | b1, | b2 | b10, |
| mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | |
| AO2-91-6 | 1116 | 140 | 140 | 368 | 460 | 970 | 190 | 514 | 547 | 20 | 18 | 457 |
| Typ | b20, | b30, | H, | h1 | h2 | h5, | h6, | h31, | h34, | d1, | d2, | d10, |
| mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | |
| AO2-91-6 | 358 | 684 | 280 | 12 | 12 | 74,5 | 64 | 622 | 552 | 70 | 60 | 22 |
Reis. 2 Gesamt-, Einbau- und Anschlussmaße
AC-Asynchron-Elektromotor AO2-91-6u3
ICH BIN.1001-1081 Paw-Hinrichtung
Tabelle 3
Gesamt-, Einbau- und Anschlussmaße
AC-Asynchron-Elektromotor AO2-91-6u3
ICH BIN.2001–2081 Kombiversion
| Typ | L, | l1, | l2, | l3, | l10, | l11, | l30, | l33, | l31, | B, | b1, | b2, | b10, | b20, | b30, |
| mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | |
| AO2-91-6 | 1116 | 140 | 146 | 374 | 368 | 460 | 970 | 190 | 514 | 547 | 20 | 18 | 457 | 358 | 684 |
| Typ | H, | h1 | h2 | h5, | h6, | h31, | h34, | d1, | d2, | d10, | d24, | d20, | d25, | nxd22 | - |
| mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | |||
| AO2-91-6 | 280 | 12 | 11 | 74.5 | 64 | 622 | 552 | 70 | 60 | 22 | 225 | 500 | 275 | 8x18 | - |
Reis. 3Gesamt-, Einbau- und Anschlussmaße
AC-Asynchron-Elektromotor AO2-91-6u3
ICH BIN.2001–2081 Kombiversion
Tabelle 4
Gesamt-, Einbau- und Anschlussmaße
AC-Asynchron-Elektromotor AO2-91-6u3
ICH BIN.
| Typ | L, | l1, | l31, | B, | b1, | b10, | b20, | b30, | H, | h1 | h5, | d1, | d25, | d20, | d24, | nxd22 |
| mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | ||
| AO2-91-6 | 970 | 140 | 514 | S84 | 20 | 660 | 358 | 684 | 292 | 12 | 74,5 | 70 | 225 | 500 | 275 | 8x18 |
Reis. 4 Gesamt-, Einbau- und Anschlussmaße
AC-Asynchron-Elektromotor AO2-91-6u3
ICH BIN.3001 -3081 Versionsflansch
Tabelle 5
Gesamt-, Einbau- und Anschlussmaße
AC-Asynchron-Elektromotor AO2-91-6u3
ICH BIN.
| Typ | L, | l1, | l2, | l3, | l10, | l11, | l30, | l31, | l33, | B, | b1, | b2, | b10, |
| mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | |
| AO2-91-6 | 1116 | 140 | 146 | 374 | 368 | 460 | 970 | 190 | 514 | 547 | 20 | 18 | 457 |
| AO2-91-6 | 1116 | 140 | 146 | 374 | 368 | 460 | 970 | 190 | 514 | 547 | 20 | 18 | 457 |
| Typ | b20, | b30, | H, | h1 | h2 | h5, | h6, | h31, | h34, | d1, | d2, | d10, | - |
| mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | mm | ||
| AO2-91-6 | 358 | 683 | 280 | 12 | 11 | 74,5 | 64 | 622 | 552 | 70 | 60 | 24 | |
| AO2-91-6 | 358 | 683 | 280 | 12 | 11 | 74,5 | 64 | 622 | 552 | 70 | 60 | 24 | - |
Reis. 5Gesamt-, Einbau- und Anschlussmaße
AC-Asynchron-Elektromotor AO2-91-6u3
ICH BIN.1001-1081 Version Multi-Speed-Pfoten
ZWECK UND ANWENDUNG
AC-Asynchron-Elektromotor AO2-91-6u3
Der dreiphasige asynchrone Elektromotor AO2-91-6u3 ist für den Antrieb verschiedener Mechanismen in stationären Anlagen und für den Betrieb als Mechanismusantrieb auf Schiffen mit unbegrenztem Navigationsbereich, mit Ausnahme von Notfallausrüstung, ausgelegt. Hergestellt für die Bedürfnisse der Volkswirtschaft, der russischen Marine mit den See- und Flussschifffahrtsregistern der Russischen Föderation.
Der dreiphasige Asynchron-Elektromotor AO2-91-6u3 wird ebenfalls gemäß den Anforderungen der behördlichen und technischen Dokumentation für Kernkraftwerke hergestellt.
Aufbau des asynchronen Wechselstrommotors AO2-91-6u3
Design und Installationsmethode: IM 1001, IM 1002, IM 2001, IM2002, IM 3011 (gemäß GOST 2479 – 79). Auf Kundenwunsch werden Motoren mit einer anderen Einbauart gefertigt.
Klimaversion– gemäßigtes, allgemeines Meeresklima (U, OM) gemäß GOST 15150.
Schutzgrad vor Umwelteinflüssen IP 44 gemäß GOST 17494-87.
Betriebsart– Langzeit S1 gemäß GOST 183-74 (für allgemeine Industrieanwendungen) und S1 gemäß GOST R 52776 (für Versionen mit Rosatom-Abnahme und Schiffsversionen).
Sicherheitsklasse– 2N nach NP-001 (zur Ausführung mit Rosatom-Abnahme).
Berechnete Erdbebenstärke– 9 Punkte auf der MSK-64-Skala (für Ausführung mit Rosatom-Abnahme).
Stromart– abwechselnd dreiphasig.
Aktuelle Frequenz– 50 und 60 Hz.
Stromspannung– 220/380V oder 380V Auf Kundenwunsch ist es möglich, Motoren für andere Spannungen herzustellen.
Drehrichtung- beliebig.
Zulässige Betriebshöhe*– 1000 m über dem Meeresspiegel.
Gruppe „Betriebsbedingungen“.
M1 gemäß GOST 17516.1–90 (für den allgemeinen industriellen Einsatz)
M6 nach GOST 17516.1 (für Version mit Rosatom-Abnahme)
M46 nach GOST 17516 (zur Schiffsausführung).
Methode zur Motorkühlung– IC01 gemäß GOST 20459–87 (für allgemeines Industriedesign) und IC0141 gemäß GOST 20459 (für Design mit Rosatom-Akzeptanz).
Hitzebeständigkeitsklasse der Statorwicklungsisolierung nicht niedriger als B gemäß GOST 8865–87 (für den allgemeinen industriellen Einsatz) und H gemäß GOST 8865 (für den Einsatz auf Schiffen).
Geräuschpegel Motoren sollten die Grenzwerte nicht überschreiten: gemäß Klasse 3 gemäß GOST 16372–84 (für allgemeine industrielle Ausführung), gemäß Klasse 1 gemäß GOST 16372–84 (für Ausführung mit Rosatom-Abnahme), Tabelle Nr. 1 von GOST R 53148 (für Marineausführung) .
*Beim Einbau des Motors über 1000m muss die Nennleistung des Motors entsprechend den Vorgaben reduziert werden.
Legende
AC-Asynchron-Elektromotor AO2-91-6u3
A – Asynchronmotor mit Käfigläufer;
O – belüftet, geschlossen;
2 – Seriennummer der Serie;
91 – Seriennummer der Abmessung (Höhe der Drehachse beträgt 280 mm);
1, 2 – Symbol für die Länge des Statorkerns;
0 – Sonderversion mit reduzierter Leistung;
4, 6, 8, 10 – Anzahl der Pole;
A – Sonderausführung mit Rosatom-Abnahme
Zum Antrieb von Holzbearbeitungsmaschinen werden asynchrone Elektromotoren einer neuen Baureihe (geschlossen, belüftet und schützend) eingesetzt. Elektromotoren dieser Baureihe mit Gusseisenkörper haben die Bezeichnung A und mit Aluminium - AL. Zur Bezeichnung geschlossener Elektromotoren wird der Buchstabe O hinzugefügt, der darauf hinweist, dass der Elektromotor durchgebrannt ist (AO, AOL). Nach den Bezeichnungen A und AL folgen drei Zahlen, die den Elektromotor charakterisieren: Die erste Zahl gibt den Außendurchmesser des Statorpakets an, die zweite die Länge dieses Pakets bei herkömmlichen Einheiten, die dritte Zahl gibt die Anzahl der Pole an.
Asynchrone Elektromotoren einer einzigen Serie werden für die Standardspannungen 127/220, 220/380 und 500 V hergestellt, jeweils mit Statorwicklungsanschlüssen: Dreieck zu Stern, Dreieck zu Stern und Stern.
Als Ersatz für die Elektromotoren der A- und AO-Reihe wird seit 1961 eine neue Reihe von Elektromotoren produziert. Es hat sowohl eine bessere als auch eine niedrigere Energieleistung Gesamtabmessungen und Gewicht. Eine neue Baureihe von Elektromotoren wird mit der Zusatznummer 2 (A2, A02, AK.2 usw.) gekennzeichnet. Basierend auf der Grundkonstruktion der Elektromotoren der Typen A2 und A02 werden Modifikationen AP2 und AOP2 mit erhöhtem Anlaufmoment hergestellt; AC2- und AOS2-Elektromotoren mit erhöhtem Schlupf; AK2-Elektromotoren mit Phasenrotor; Die Elektromotoren A2 und A02 sind mehrtourig.
Diese Elektromotoren sind für die Spannungen 220/380 und 500 V mit erhöhtem Anlaufmoment und Käfigläufer erhältlich. Das Design ist geschlossen, belüftet. Ausführungsformular M-101.
Die wichtigsten technischen Daten der Elektromotoren der AOP2-Serie sind in der Tabelle aufgeführt. 15.
DREIPHASIGE INDUKTIONS-ELEKTROMOTOREN, SERIE AOS2 (GOST 183-66)
Diese Elektromotoren sind mit 220/380, 380 oder 500 V mit erhöhtem Schlupf und Käfigläufer erhältlich. Ihre wichtigsten technischen Daten sind in der Tabelle aufgeführt. 16, 17.
Tabelle 16
Technische Daten der Asynchron-Elektromotoren der AOS2-Serie
|
Power, ket, Mit syn- |
||||||||
|
chronische Rotationsgeschwindigkeit, |
||||||||
|
Elektromotor |
oh/mann | kg | ||||||
| 600 | ||||||||
| AOS2-31-4, | 6 | |||||||
| AOS2-32-4, | 6 | - | ||||||
| AOS2-41-4, | 6, | 8 | ||||||
| AOS2-42-4, | 6, | 8 | ||||||
| AOS2-51-4, | 8 | |||||||
| AOS2-52-4, | 6, | 8 | ||||||
| AOS2-61-4, | 6, | 8 | ||||||
| AOS2-62-4, | 6, | 8 | ||||||
| AOS2-71-4, | 6, | 8 | ||||||
| AOS2-72-4, | 8 | |||||||
| AOS2-81-4, | 6, | 8, | 10………………………………………. | |||||
| AOS2-82-4, | 6, | 8, | 10……………………………………….. | |||||
| AOS2-91-4, | 6, | 8, | 10………………………………………. | 58 | ||||
| AOS2-92-4, | 6, | 00 | 10………………………………………. | |||||
ASYNCHRONE ELEKTROMOTOREN, DREHSTROM, BAUREIHE AK2 (TU AB.4.12252)
Diese Elektromotoren werden mit Phasenrotor für Spannungen von 220/380 und 500 U/min hergestellt. Sie sind für den Dauerbetrieb an einem Netz mit einer Frequenz von 50 Hz ausgelegt. Ausführung geschützt. Ausführungsformular – M-101.
Die wichtigsten technischen Daten solcher Elektromotoren sind in der Tabelle aufgeführt. 18.
Tabelle 18
Technische Daten der Asynchron-Elektromotoren der AK2-Serie
|
Macht, Kat, bei |
|||||
|
Noah-Rotationsgeschwindigkeit, U/min |
Gewicht, | ||||
|
Motortyp |
|||||
| 1500 | 1000 | ||||
| AK2-81-A, | C), 8…………………………………………………… | 22 | |||
| AK2-82 A, | (>, N…………………………………………………… | 30 | |||
| AK2-91-4, | 0, 8………………………………………….. | 40 | |||
| AK2-92-4, | 0, 8………………………………………….. | 555 | |||
DREIPHASIGE INDUKTIONS-ELEKTROMOTOREN SERIE A02 und AOL2 (MRTU 2-015-002-62)
Diese Elektromotoren (A02-Serie in einem Gusseisengehäuse und AOL2 in Aluminiumschale) für den allgemeinen industriellen Einsatz mit Käfigläufer, werden für Spannungen von 220/380 und 500 E hergestellt. Die Bauform ist geschlossen, belüftet. Ausführungsformular M-101.
Die wichtigsten technischen Daten solcher Elektromotoren sind in der Tabelle aufgeführt. 19, 20.
0 Tabelle 19
Technische Daten der Asynchron-Elektromotoren der Serien A02 und AOL2 bei einer Synchrondrehzahl von 3000 U/min
|
Elektrischer Typ |
Leistung, kt | Gewicht, | Elektrischer Typ |
Leistung, |
Gewicht, |
|
Motor |
Motor | ket | |||
| JSC L 2-11-2 | |||||
| AOL2-12-2 | |||||
| AOL2-21-2 | |||||
| AOL2-22-2 | |||||
| AOL2-31-2 | |||||
| AOL2-32-2 | |||||
| A02-21-2 | |||||
| A02-22-2 | |||||
| A02-31-2 | |||||
| A02-32-2 | |||||
| A02-41- 2 |
DREIPHASIGE INDUKTIONS-ELEKTROMOTOREN, SERIE AOLS2 (STU 79-1957-65)
Diese Elektromotoren (im Aluminiumgehäuse) erzeugen Spannungen von 127/220, 220/380 oder 500 V mit erhöhtem Schlupf und einem kurzen geschlossenen Rotor. Das Design ist geschlossen, belüftet. Ausführungsformular - M-101 - Die wichtigsten technischen Daten solcher Elektromotoren sind in der Tabelle aufgeführt. 21, 22.
Technische Daten der Asynchron-Elektromotoren der AOLS2-Serie bei einer Synchrondrehzahl von 3000 U/min
| Motortyp | Leistung, kt | Gewicht, kg | Motortyp | Leistung, kt | |
| . A0LS2-12-2 | |||||
ASYNCHRONE DREIPHASIGE ELEKTROMOTOREN MIT ZWEI GESCHWINDIGKEITEN, SERIE A02
Diese Elektromotoren sind für die Spannungen 220, 380 und 500 V mit Käfigläufer erhältlich. Das Design ist geschlossen, belüftet. Ausführungsformular – M-101.
Die wichtigsten technischen Daten dieser Elektromotoren sind in der Tabelle aufgeführt. 23.
Elektromotoren mit 750/1500 U/min
| A02-41- | -8/4 | 1.6 | A02-62-8/4 | |||||
| 2,5 | ||||||||
| A02-42- | -8/4 | 2,3 | A02-71-8/4 | |||||
| 2,9 | ||||||||
| A02-51- | -8/4 | 3,0 | A02-72-8/4 | |||||
| 4,8 | ||||||||
| A02-52- | -8/4 | 4,1 | A02-81-8/4 | |||||
| 6,6 | ||||||||
| A02-61- | -8/4 | 5,5 | A02-82-8/4 | |||||
| 8,5 | ||||||||
| Elektromotoren | bei 1500/3000 U/min | |||||||
| A02-31- | -4/2 | 1,8 | A02-51-4/2 | |||||
| 2,3 | ||||||||
| A02-32- | -4/2 | 2,3 | A02-52-4/2 | |||||
| 2,9 | ||||||||
| A02-41 | -4/2 | 3,3 | L02-61-4/2 | |||||
| 4,1 | ||||||||
| A02-42 | -4/2 | 5,5 | A02-62-4/2 | |||||
| 4,7 | ||||||||
ASYNCHRONE ELEKTROMOTOREN DER DREHSTROMTYPEN T, FT, F (TU 2-024-19-66)
Bei Holzbearbeitungsmaschinen werden als Antrieb asynchrone Elektromotoren der Typen T, FT, F eingesetzt. geringe Leistung sowie Elektromotoren der DPT-Serie.
Diese Elektromotoren arbeiten mit einer Spannung von 220/380 V und einer Netzfrequenz von 50 Hz. Die Ausführung ist geschlossen. Die Bauform für Elektromotoren vom Typ T und F ist M-261, für Elektromotoren vom Typ FT M-361.
Die wichtigsten technischen Daten dieser Elektromotoren sind in der Tabelle aufgeführt. 24.
Tabelle 24
Technische Daten der Asynchron-Elektromotoren Typ T, FT, F
|
Motortyp |
Kraft, W |
Geschwindigkeit Drehung, |
Motortyp |
Leistung, |
Rotationsgeschwindigkeit |
||
| 80 | 1400 | 4,2 | 120 | 2800 | 4,4 | ||
| 80 | 1400 | 4,4 | 120 | 2800 | 4,4 | ||
| 120 | 2800 | 4,2 |
INDUKTIONSELEKTROMOTOREN, DREIPHASIGER STROM, SERIE DPT
Diese Elektromotoren werden für Spannungen von 127/220 und 220/380 V, Frequenz 50 Hz, mit Käfigläufer hergestellt. Das Design ist geschlossen, belüftet. Ausführungsformular – M-211.
Die wichtigsten technischen Daten solcher Elektromotoren sind in der Tabelle aufgeführt. 25.
Tabelle 25
Technische Daten der Asynchron-Elektromotoren der DPT-Serie
| Motortyp |
Kraft, W |
Geschwindigkeit Drehung, |
Motortyp |
Kraft, W |
Rotationsgeschwindigkeit |
||
| 270 | 1400 | 8,7 |
DPT-22-4/2S2 |
9,8 | |||
| 500 | 1410 | 9,8 | DPT-22-2S2 | 10,0 | |||
| 400 | 2800 | 8,7 |
DPT-21-4/2S2 |
8,7 |
INDUKTIONSELEKTROMOTOREN, DREHSTROM, EXPLOSIONSGESCHÜTZT SERIE VAO
Diese Elektromotoren werden mit einem Käfigläufer hergestellt. Sie sind für den Einsatz in Anlagen mit möglicher Bildung von Schlagwetter (Methan) sowie in Gegenwart von explosivem Kohlenstaub und Dampf sowie Gas-Luft-Gemischen der Brennbarkeitsgruppen 1, 2 und 3 konzipiert. Ausführungsformular – M-101.
|
Art des Elektromotors |
■2 | ■2 | |||||||
|
Macht, Kat, bei |
|||||||||
|
Synchrongeschwindigkeit |
|||||||||
|
Rotation 3000 U/min |
|||||||||
|
Art des Elektromotors |
|||||||||
|
Macht, Kat, bei |
|||||||||
|
Synchrongeschwindigkeit |
|||||||||
|
Rotation 1500 U/min |
|||||||||
|
1 Art des Elektromotors |
|||||||||
|
Macht, Kat, bei |
|||||||||
|
Synchrongeschwindigkeit |
|||||||||
|
Drehzahl 1000 U/min |
|||||||||
|
Art des Elektromotors |
|||||||||
|
Macht, Kat, bei |
|||||||||
|
Synchrongeschwindigkeit |
|||||||||
|
Rotation 750 U/min |
|||||||||
|
Art des Elektromotors |
|||||||||
|
Macht, Kat, bei |
|||||||||
|
Synchrongeschwindigkeit |
|||||||||
|
Rotation 3000 U/min |
|||||||||
|
Art des Elektromotors |
|||||||||
|
Macht, Kat, bei |
|||||||||
|
Synchrongeschwindigkeit |
|||||||||
|
Rotation 1500 U/min |
Elektromotortyp - VAO-32-6 VAO-41-6 BAO-42-6 VAO-51-6 VAO-52-6
Gatela
Leistung, kt, bei 2,2 3,0 4,0 5,5 7,5
Synchrongeschwindigkeit
Drehzahl 1000 U/min
Elektromotortyp - BAO-62-8 BAO-71-8 VAO-72-8 VAO-81-8 BAO-82-8
Gatela
Macht, Katze. bei 10,0 13,0 17,0 22,0 30,0
Synchrongeschwindigkeit
Rotation 750 U/min
Notiz. Isolationsklasse des Elektromotors – B. Ausführung – RV, B15, belüftet.
Elektromotoren der BAO-Serie werden auch als Antriebe und Einzelaggregate von Holzbearbeitungsmaschinen eingesetzt.
Nachfolgend sind die wichtigsten technischen Daten der Elektromotoren der BAO-Serie aufgeführt.
Tabelle 26
Elektromotoren der BAO-Serie, installiert in Holzbearbeitungsgeräten
|
Gerätename |
Motor Leistung, |
Rotationsgeschwindigkeit, |
Anzahl der installierten Elektromotoren, Stk. |
Einbauort des Elektromotors |
|
|
PZShch-Maschine für |
BAO-12-6 | 0,6 |
Vibrationsmechanismus |
||
|
Porenfüllung |
|||||
| BAO-22-6 | 1,1 |
Rollenantrieb |
|||
| VAO-11-6 | 0,4 | ||||
|
ShPSh-Maschine für |
BAO-42-8 | ||||
|
Grundierung darunter |
|||||
|
undurchsichtiges Finish |
|||||
|
Lackflüssigkeit |
BAO-22-2 | 2,2 |
» Förderband |
||
| BAO-22-2 | 0,8 | - | |||
|
Einzeltrommel |
VAO-51-4 | 7,5 |
» Trommel |
||
|
Polieren |
|||||
|
Biegemaschine |
Beispiele für den Einsatz von Elektromotoren in Holzbearbeitungsgeräten sind in der Tabelle aufgeführt. 26.
In Abb. Abbildung 33 zeigt ein kinematisches Diagramm einer Eintrommel-Poliermaschine P1B. Als Antrieb ist diese Maschine mit einem VAO-51-4 Elektromotor mit einer Leistung von 7,5 kW und einer Drehzahl von 1500 U/min ausgestattet.
Zum Antrieb von Holzbearbeitungsmaschinen werden Elektromotoren der Baureihen MD und MDU mit Käfigläufer eingesetzt.
Sie werden über das Stromnetz mit einer Stromfrequenz von 50 und 100 g/c versorgt. Das Design ist geschlossen, belüftet. Ausführungsformular M-101.
Technische Eigenschaften von Elektromotoren der MD- und MDU-Serie
| md-o | md-z |
MDMU-1 MDMU-2 |
|||||
|
Leistung, kt |
|||||||
|
Rotationsgeschwindigkeit. |
|||||||
|
Netzspannung, V |
|||||||
|
Frequenz Hz |
|||||||
|
Leistung, kt |
|||||||
|
Rotationsgeschwindigkeit. |
|||||||
|
Netzspannung, V |
|||||||
|
Frequenz |
|||||||
In Abb. Abbildung 34 zeigt eine Vierseitenhobelmaschine S16-5P mit eingebautem Elektromotor der MD-Serie.