Määritä suoraan verkossa. Yksinkertaiset tehtävät suoraan koneeseen
Oletetaan, että avaruudessa on suora l.ja m.. Jotkin pisteen ja tilan kautta viettää suoria l. 1 || L.ja M. 1 || M. (Kuva 138).
Huomaa, että kohta A voidaan valita mielivaltaisesti, erityisesti se voi olla jollakin suorista datasta. Jos suora l.ja m. leikkaavat, näiden suoran risteyksessä on mahdollista ( l. 1 \u003d L.ja M. 1 \u003d M.).
Kulma ei-rinnakkainen suora l.ja m. kutsutaan pienimmän vierekkäisten kulmien suuruus, joka muodostuu suorasta l. 1 ja M. 1 (l. 1 || L., M. 1 || M.). Rinnakkaisen suoran välisen kulman katsotaan olevan nolla.
Kulma suora l.ja m. tarkoittaa \\ (\\ WideHat ((l; m)) \\). Määritelystä seuraa, että jos se mitataan asteina, sitten 0 ° < \\ (\\ WideHat ((l; m)) \\) < 90 ° ja jos radialaisissa, sitten 0 < \\ (\\ WideHat ((l; m)) \\) < π / 2 .
Tehtävä. Dan ABCDA 1 B 1 C 1 D 1 (kuva 139).

Etsi kulma suora AV ja DC 1.
Suora AB ja DC 1 Crossing. Koska suora DC on yhdensuuntainen Direct AB: n kanssa, kulma Direct AB: n ja DC 1: n välillä määritelmän mukaan on \\ (\\ WileHat (C_ (1) DC).
Siksi \\ (\\ WideHat ((AB, DC_1)) \u003d 45 °.
Suoraan l.ja m. olla nimeltään kohtisuoraJos \\ (Wilehat ((l; m)) \\) \u003d π / 2. Esimerkiksi Kuubassa
Laskemalla kulma suora.
Tehtävä lasketaan kahden välittömän tilan välisen kulman välillä sekä tasossa. Merkitse φ kulman suuruus suoran L. 1 ja L. 2 ja ψ - ohjausvektoreiden välisen kulman suuruus mutta ja b. Nämä suorat.

Sitten, jos
ψ <90° (рис. 206, а), то φ = ψ; если же ψ > 90 ° (Kuva 206.6), sitten φ \u003d 180 ° - ψ. On selvää, että molemmissa tapauksissa tasa-arvo cos φ \u003d | cos ψ |. Kaavan mukaan (ei-vektorien A ja B välisen kulman kosiini on yhtä suuri kuin näiden vektoreiden skalaarituote, joka on jaettu niiden pituuden työhön) Meillä on
$$ cos \\ psi \u003d cos wilehat (a; b)) \u003d \\ frac (a \\ cdot b) (| a | \\ cdot | b |) $$
siten,
$$ COS \\ PHI \u003d \\ FRAC (| A \\ CDOT B |) (| A | \\ CDOT | B |) $$
Anna suoraan antaa niiden kanoniset yhtälöt
$$ \\ frac (x-x_1) (a_1) \u003d \\ frac (y-y_1) (a_2) \u003d \\ frac (z - z_1) (A_3) \\; \\; ja \\; \\; \\ Frac (x-x_2) (b_1) \u003d \\ frac (y-y_2) (b_2) \u003d \\ frac (z-z_2) (b_3) $$
Sitten suoran kulma φ määritetään kaavalla
$$ COS \\ PHI \u003d \\ FRAC (| A_ (1) B_1 + A_ (2) B_2 + A_ (3) B_3 |) (\\ SQRT ((A_1) ^ 2 + (A_2) ^ 2 + (A_3) ^ 2 ) \\ Sqrt ((b_1) ^ 2 + (b_2) ^ 2 + (b_3) ^ 2)) (1) $$
Jos jokin suorasta (tai molemmista) on määritetty, ei ole Canonic-yhtälöt, sitten kulma, on välttämätöntä löytää näiden kantojen ohjausvektoreiden koordinaatit ja käytä sitten kaava (1).
Tehtävä 1. Laske kulma suora
$$ \\ frac (x + 3) (- \\ sqrt2) \u003d \\ frac (y) (\\ sqrt2) \u003d \\ frac (z-7) (- 2) \\; ja \\; \\; \\ Frac (x) (\\ sqrt3) \u003d \\ frac (y + 1) (\\ sqrt3) \u003d \\ frac (z-1) (\\ sqrt6) $$
Suorat vektorit ovat koordinaatteja:
a \u003d (-√2; √2; -2), b. = (√3 ; √3 ; √6 ).
Kaavan (1) mukaan löydämme
$$ COS \\ PHI \u003d \\ FRAC (| - \\ SQRT6 + \\ SQRT6-2 \\ SQRT6 |) (\\ SQRT (2 + 2 + 4) \\ SQRT (3 + 3 + 6)) \u003d \\ FRAC (2 \\ SQRT6) (2 \\ sqrt2 \\ cdot 2 \\ sqrt3) \u003d \\ frac (1) (2) $$
Näin ollen suoran viivan välinen kulma on 60 °.
Tehtävä 2. Laske kulma suora
$$ aloita (kotelot) 3x-12z + 7 \u003d 0 \\\\ X + Y-3Z-1 \u003d 0 \\ END (kotelot) ja aloita (kotelot) 4x-y + z \u003d 0 \\\\ y + z + 1 \u003d 0 \\ Lopeta (Kotelot) $$
Ohjaava vektori mutta Ensimmäinen suora ottaa vektorituotteet normaaleista vektoreista n. 1 \u003d (3; 0; -12) ja n. 2 \u003d (1; 1; -3) Lentokoneet, jotka pyytävät tätä suoraa. Kaavan mukaan (\u003d aloitus (vmatrix) i & j & k \\\\ x_1 & y_1 & z_1 \\\\ x_2 & y_2 & z_2 \\ end (vmatrix)
$$ a \u003d\u003d aloita (vmatrix) I & J & K \\\\ 3 & 0 & -12 \\\\ 1 & 0 &3 \\ end (vmatrix) \u003d 12i-3i + 3k $$
Samoin löydämme toisen suoran ohjausvektorin:
$$ b \u003d aloita (Vmatrix) I & J & K \\\\ 4 & J & 1 \\\\ 0 & 1 & 1 End (Vmatrix) \u003d - 2i-4i + 4k $$
Mutta kaava (1) Laske keinotekoisen kulman kosini:
$$ COS \\ PHI \u003d \\ FRAC (| 12 \\ CDOT (-2) -3 (-4) +3 \\ CDOT 4 |) (\\ sqrt (12 ^ 2 + 3 ^ 2 + 3 ^ 2) \\ sqrt (2 ^ 2 + 4 ^ 2 + 4 ^ 2)) \u003d 0 $$
Näin ollen datan välinen kulma on 90 °.
Tehtävä 3. MAVS-kylkiluun MB: n, MB: n ja MS: n kolmion muotoisessa pyramidissa kohtisuorassa (kuvio 207);

heidän pituiset ovat vastaavasti 4, 3, 6. piste D on keskimmäinen [MA]. Etsi kulma φ suoran CA: n ja DB: n välillä.
Anna CA: n ja DB: n ohjausvektorit suoran CA: n ja DB: n vektorit.
Otetaan kohta M koordinaattien alkuun. Zyadachin kunto, meillä on (4; 0, 0), (0; 0; 3), (0; 6, 0), d (2; 0; 0). Siksi \\ (\\ verrantrighterrow (ca) \\) \u003d (4; - 6; 0), \\ (\\ verikokoinen (dB) \\) \u003d (-2; 0; 3). Käytämme kaava (1):
$$ COS \\ PHI \u003d \\ FRAC (| 4 \\ CDOT (-2) + (- 6) \\ CDOT 0 + 0 \\ CDOT 3 |) (\\ SQRT (16 + 36 + 0) \\ SQRT (4 + 0 + 9) )) $$.
Kossin pöydässä havaitsemme, että suora CA: n ja DB: n välinen kulma on noin 72 °.
Tämä materiaali on omistettu tällaiseen konseptiin kuin kulma kahden leikkaamisen välissä. Ensimmäisessä vaiheessa selitämme, mitä hän on ja näyttää sen kuvituksista. Sitten analysoimme, miten sinus löytyy, tämän kulman kosini ja itse kulma (erikseen harkitsemaan tapauksia tasossa ja kolmiulotteisessa tilassa), annamme tarvittavat kaavat ja näytämme esimerkkejä esimerkkeistä, kuinka tarkalleen ne sovelletaan käytännössä.
Yandex.rtb R-A-339285-1
Ymmärtääkseen, mitä kulma muodostuu kahden suoran risteyksestä, meidän on muistutettava kulman, kohtisuuden ja risteyspisteiden määrittämisestä.
Määritelmä 1.
Me kutsumme kaksi suoraa leikkaamista, jos heillä on yksi yhteinen kohta. Tätä pistettä kutsutaan kahden suoran linjan risteykseksi.
Jokainen suora erotetaan säteiden leikkauspisteellä. Sekä suora samanaikaisesti muodostavat 4 kulmat, joista kaksi on pystysuora, ja kaksi ovat vierekkäisiä. Jos tiedämme jonkin jäsenen mittauksen, voimme tunnistaa muut jäljellä olevat.
Oletetaan, että tiedämme, että yksi kulmista on yhtä suuri kuin α. Tässä tapauksessa se on pystysuora suhteessa siihen, että se on myös sama kuin α. Jäljellä olevien kulmien löytämiseksi meidän on laskettava ero 180 ° - α. Jos α on 90 astetta, kaikki kulmat ovat suorat. Linjan oikeassa kulmassa on kohtisuora (yksittäinen artikkeli on kohdistettu kohtisuoran käsitteeseen).
Tutustu piirustukseen:
Käännymme perusmäärityksen muotoiluun.
Määritelmä 2.
Kahden leikkausneen muodostettu kulma on mittaus pienempi 4-kulmat, jotka muodostavat kaksi näistä suorasta.
Määritelmästä on välttämätöntä tehdä tärkeä johtopäätös: tässä tapauksessa kulman koko ilmaisee millä tahansa todellisella numerolla (0, 90]. Jos suora on kohtisuorassa, kulma niiden välissä on 90 astetta.

Kyky löytää kolmen kulman mittaus kahden leikkauksen välisen suoran välillä on hyödyllinen monien käytännön tehtävien ratkaisemiseksi. Ratkaisumenetelmä voidaan valita useista vaihtoehdoista.
Aluksi voimme ottaa geometriset menetelmät. Jos tiedämme jotain ylimääräisistä kulmista, voit sitoa ne kulmaan, jota tarvitsemme yhtäläisten tai vastaavien muotojen ominaisuuksien avulla. Esimerkiksi jos tiedämme kolmioon ja sinun on laskettava kulma suoran, johon nämä osapuolet sijaitsevat, niin ratkaisuihin, kosini-lause on sopiva. Jos meillä on suorakaiteen muotoinen kolmio, sitten laskelmat, käytämme myös sinus-, kosini- ja tangenttien tuntemusta.
Koordinaattimenetelmä on myös erittäin kätevä tämäntyyppisten ongelmien ratkaisemiseksi. Selitä, miten sitä käytetään oikein.
Meillä on suorakaiteen muotoinen (decartian) koordinaattijärjestelmä O X Y, jossa annetaan kaksi suoraa viivaa. Merkitse ne kirjaimilla A ja b. Suoraan tämän kanssa voidaan kuvata käyttämällä yhtälöitä. Lähde suoraviivalla on risteyspiste M. Kuinka määrittää haluttu kulma (merkitse se α) näiden suoran välillä?
Aloitamme perusperiaatteen sanamuodosta, jonka mukaan kulma on määritelty olosuhteissa.
Tiedämme, että suoran linjan käsitteen mukaan tällaiset käsitteet, kuten ohjaus ja normaali vektori ovat tiiviisti kytkettyjä. Jos meillä on yhtälö tiettyihin suoraan, voit ottaa näiden vektorien koordinaatit. Voimme tehdä sen välittömästi kahdelle suoralle linjoille.
Kahden leikkauksen muodostettu kulma löytyy käyttämällä:
- ohjausvektorien välinen kulma;
- kulma normaalien vektorien välillä;
- normaalin vektorin välinen kulma on yksi suora ja e-ohjausvektori.
Harkitse nyt joka tapauksessa erikseen.
1. Oletetaan, että meillä on suora a ohjausvektori A → \u003d (A X, A Y) ja suora B ohjausvektori B → (b x, b y). Nyt siirrä kaksi vektoria A → ja B → risteyspisteestä. Tämän jälkeen näemme, että ne sijaitsevat jokaisen suorassaan. Sitten meillä on neljä vaihtoehtoa keskinäiselle sijainnille. Katso kuva:

Jos kahden vektorin välinen kulma ei ole tyhmä, niin se on kulma, jota meidän on mentävä väliin suoran A ja b välillä. Jos se on tyhmä, haluttu kulma on yhtä suuri kuin A →, B → ^ vieressä oleva kulma. Siten α \u003d A →, B → ^ Jos A →, B → ^ ≤ 90 ° ja α \u003d 180 ° - A →, b → ^, jos A →, b → ^\u003e 90 °.
Perustuu siihen, että yhtäläiset kulmat ovat yhtä suuret, voimme kirjoittaa tuloksena olevan tasa-arvon uudelleen: cos α \u003d cos A →, b → ^, jos A →, b → ^ ≤ 90 °; COS α \u003d COS 180 ° - A →, B → ^ \u003d - COS A →, b → ^, jos A →, b → ^\u003e 90 °.
Toisessa tapauksessa käytettiin kaavoja. Tällä tavalla,
cos α cos a →, b → ^, cos a →, b → ^ ≥ 0 - cos a →, b → ^, cos a →, b → ^< 0 ⇔ cos α = cos a → , b → ^
Kirjoitamme viimeisen kaavan sanoja:
Määritelmä 3.
Kahden leikkauksen muodostuneen kulman kosinaa on yhtä suuri kuin ohjausvektoreiden kulman kosinan moduuli.
Kahden vektorin a → \u003d (A x, A y) ja b → \u003d (b x, b y) välisen kalkkikuvan yleinen ulkonäkö näyttää tästä:
cos a →, b → ^ \u003d a →, b → ^ a → · b → \u003d x · b x + a y + b y A X 2 + A Y 2 · B x 2 + B Y2
Sieltä voimme saada kahden määritetyn välin välisen kulman kosinin kaavan:
cOS α \u003d A X · B X + A Y + B Y A X 2 + A Y 2 · B x 2 + B Y 2 \u003d A X · B X + A Y + B Y A X 2 + A Y 2 · B x 2 + B Y2
Sitten itse kulma löytyy seuraavasta kaavasta:
α \u003d R C COS A X · B X + A Y + B Y A X 2 + A Y 2 · B x 2 + B Y2
Tässä → \u003d (A X, A Y) ja B → \u003d (B X, B Y) ovat määritetyn suoran ohjausvektorit.
Annamme esimerkin ongelman ratkaisemisesta.
Esimerkki 1.
Tason suorakaiteen muotoisessa koordinaatistossa annetaan kaksi suoraa suoraa linjaa A ja B. Niitä voidaan kuvata parametrisilla yhtälöillä x \u003d 1 + 4 · λ y \u003d 2 + λ λ ∈ r ja x 5 \u003d Y - 6 - 3. Laske näiden suoran välinen kulma.
Päätös
Meidän tilissänne on parametrinen yhtälö, se tarkoittaa, että tämän suoraan voimme kirjoittaa välittömästi ohjausvektorin koordinaatit. Tätä varten meidän on otettava kertoimien arvot parametrilla, ts. Direct X \u003d 1 + 4 · λ Y \u003d 2 + λ λ ∈ r: llä on ohjausvektori A → \u003d (4, 1).
Toinen suora kuvataan kanonisen yhtälön X 5 \u003d Y - 6 - 3 käyttämällä. Täällä voimme ottaa koordinaatit nimittäjiltä. Siten tällä suoralla on ohjausvektori B → \u003d (5, - 3).
Seuraavaksi mene suoraan kulman löytämiseen. Tätä varten korvaamme yksinkertaisesti kahden vektorin käytettävissä olevat koordinaatit edellä olevassa Formorm α \u003d A Rc COS A x · B x + A Y + B Y A X 2 + A Y 2 · B x 2 + B Y2. Saat seuraavat tiedot:
α \u003d R C COS 4 · 5 + 1 (- 3) 4 2 + 1 2 · 5 2 + (- 3) 2 \u003d R C COS 17 17 · 34 \u003d R C COS 1 2 \u003d 45 °
Vastaus: Data suora muodostaa 45 asteen kulma.
Voimme ratkaista tällaisen tehtävän etsimällä kulman normaalien vektoreiden välillä. Jos meillä on suoralla A normaalilla na → \u003d (nakso, nakso) vektori ja suora B normaali nb → \u003d (NBX, NBY) vektori, sitten niiden välinen kulma on yhtä suuri kuin NA → ja NB → joko nurkka, joka on na →, nb → ^. Tämä menetelmä näkyy kuvassa:

Kaavat laskemiseksi kulman laskemiseksi suoraan ja suurin osa tästä kulmasta normaalin vektoreiden koordinaattien avulla näyttää tältä:
cos α \u003d cos na →, nb → ^ \u003d n и X · NBX + NBY + NBYNAX 2 + NBY 2 · NBX 2 + NBY 2 a \u003d ARC COS NAX · NBX + NAY + NBYNAX 2 + NAY 2 · NBX 2 + NBY 2
Tässä n a → ja n b → merkitsevät kahden asetuksen välittömän suoran normaalit vektorit.
Esimerkki 2.
Suorakulmaisessa koordinaattijärjestelmässä annetaan kaksi suoraa viivaa käyttämällä yhtälöitä 3 x + 5 y - 30 \u003d 0 ja x + 4 y - 17 \u003d 0. Etsi sinus, kosin kulma niiden välillä ja tämän kulman suuruus itse.
Päätös
Lähde suorat viivat annetaan käyttämällä normaaleja yhtälöitä suoran muodon x + b y + c \u003d 0. Normaali vektori merkitsee n → \u003d (a, b). Löydämme ensimmäisen normaalin vektorin koordinaatit yhdelle suoralle ja kirjoittaa ne: n a → \u003d (3, 5). Toisen Direct X + 4 Y - 17 \u003d 0 normaalilla vektorilla on koordinaatit n b → \u003d (1, 4). Lisää nyt saadut arvot kaavaan ja laske tulos:
cos α \u003d cos n a →, n b → ^ \u003d 3 · 1 + 5 · 4 3 2 + 5 2 · 1 2 + 4 2 \u003d 23 34 · 17 \u003d 23 2 34
Jos tiedämme kosinkulmassa, voimme laskea sen sinus käyttämällä Trigonometrisen identiteetin. Koska kulma α, joka on muodostettu suoraan, ei ole tylsää, sitten SIN \u003d 1 - COS 2 a \u003d 1 - 23 2 34 2 \u003d 7 2 34.
Tässä tapauksessa α \u003d R C COS 23 2 34 \u003d R C SIN 7 2 34.
Vastaus: COS α \u003d 23 2 34, SIN α \u003d 7 2 34, α \u003d R C COS 23 2 34 \u003d R C SIN 7 2 34
Analysoimme viimeisen tapauksen löytämistä suoran välisen kulman, jos tiedämme toisen suoran ja normaalin vektorin ohjausvektorin koordinaatit.
Oletetaan, että suoralla A on ohjausvektori A → \u003d (A x, A Y) ja suora viiva B on normaali vektori n b → \u003d (n b x, n b y). Meidän on lykättävä näitä vektoreita risteyksistä ja harkita kaikkia niiden keskinäisen sijainnin vaihtoehtoja. Katso kuva:

Jos määritettyjen vektoreiden välisen kulman arvo on enintään 90 astetta, se osoittautuu, että se täydentää kulmaa A: n ja B: n väliseen kulmaan.
a →, n b → ^ \u003d 90 ° - α Jos a →, n b → ^ ^ ≤ 90 °.
Jos se on alle 90 astetta, saamme seuraavat:
a →, n b → ^\u003e 90 °, sitten A →, n b → ^ \u003d 90 ° + a
Kirjoita yhtäläiset kosinan yhtäläiset kulmat.
cos a →, n b → ^ \u003d cos (90 ° - α) \u003d SIN α a: ssa →, n b → ^ ^ ≤ 90 °.
cos a →, n b → ^ \u003d cos 90 ° + α \u003d - SIN α a: ssa →, n b → ^\u003e 90 °.
Tällä tavalla,
sIN α \u003d COS A →, Huom! → ^, A →, Huom. → ^ ≤ 90 ° - COS A →, Huom: → ^, A →, Huom. → ^\u003e 90 ° ⇔ SIN α \u003d COS A →, Huom: → ^, A →, Huom: → ^\u003e 0 - COS A →, Huom: → → ^, A →, Huom! → ^< 0 ⇔ ⇔ sin α = cos a → , n b → ^
Muodamme tuotoksen.
Määritelmä 4.
Jos haluat löytää sini-kulman kahden suoran linjan väliin, jotka leikkaavat koneen, sinun on laskettava kosinimoduuli toisen ensimmäisen suoran ja normaalin vektorin ohjausvektorin välillä.
Kirjoitamme tarvittavat kaavoja. Sine-nurkan löytäminen:
sIN α \u003d COS A →, n b → ^ \u003d A x · n b x + a y · n b y A x 2 + A y 2 · n b x 2 + n b y 2
Nurkan löytäminen:
α \u003d R C SIN \u003d A X · N B X + A Y · n B Y A X 2 + A Y 2 · N B x 2 + n B Y 2
Tässä → on ensimmäinen rivinohjausvektori ja n b → on normaali toinen vektori.
Esimerkki 3.
Yhtälöt X - 5 \u003d Y - 6 3 ja X + 4 Y - 17 \u003d 0. Etsi risteyskulma.
Päätös
Otamme ohjaimen ja normaalin vektorin koordinaatit määritetyistä yhtälöistä. Se osoittautuu → \u003d (- 5, 3) ja n → b \u003d (1, 4). Otamme kaava α \u003d R C SIN \u003d A X · N B X + A Y · N B Y A X 2 + A Y 2 · N B x 2 + N B Y2 ja harkitse:
α \u003d R C SIN \u003d - 5 · 1 + 3 · 4 (- 5) 2 + 3 2 · 1 2 + 4 2 \u003d R C SIN 7 2 34
Huomaa, että olemme ottaneet yhtälöitä edellisestä tehtävästä ja saimme täsmälleen saman tuloksen, mutta toisella tavalla.
Vastaus: α \u003d R C SIN 7 2 34
Annamme toisen tavan löytää haluttu kulma määritetyn suoran kulmakertoimien avulla.
Meillä on suoraa A, joka annetaan suorakulmaisessa koordinaattijärjestelmässä käyttäen Y \u003d K 1 · x + b 1 yhtälöä ja suoraa B, annettu y \u003d k 2 · x + b 2. Nämä ovat yhtälöitä suoraan kulmakerroin. Löytää risteyskulma, käytämme kaava:
α \u003d R C COS K 1 · K2 + 1 K 1 2 + 1 · K 2 2 + 1, jossa K1 ja K2 ovat määritetyn suoran kulmakertoimet. Tämän merkinnän saamiseksi käytettiin kaavoja kulman määrittämiseksi normaalien vektoreiden koordinaattien kautta.
Esimerkki 4.
Yhtälöiden Y \u003d - 3 5 x + 6 ja y \u003d - 1 4 x + 17 4 antamat kaksi suoraa leikkausta on kaksi suoraa leikkausta. Laske risteyskulman suuruus.
Päätös
Linjan kulmakertoimet ovat yhtä suuria kuin k 1 \u003d - 3 5 ja k2 \u003d - 1 4. Lisäämme ne kaavaan α \u003d R C COS K 1 · K 2 + 1 K 1 2 + 1 · K 2 2 + 1 ja lasketaan:
α \u003d R C COS - 3 5 · 1 4 + 1 - 3 5 2 + 1 · 1 4 2 + 1 \u003d A R C COS 23 20 34 24 · 17 16 \u003d R C COS 23 2 34
Vastaus: α \u003d R c cos 23 2 34
Tämän kohdan päätelmissä on huomattava, että tässä esitetyt kaavat eivät välttämättä oppia sydäntä. Tätä varten riittää tuntemaan määritetyn suoran ohjaimen ja / tai normaalin vektorin koordinaatit ja pystyvät määrittämään ne eri tyypissä yhtälöissä. Mutta kulman kosinin laskemisen kaava muistetaan paremmin tai tallennetaan.
Miten lasketaan kulman välissä suoraan avaruudessa
Tällaisen kulman laskemista voidaan vähentää ohjausvektoreiden koordinaattien laskemiseksi ja näiden vektoreiden muodostaman kulman määrittämiseksi. Tällaisissa esimerkeissä käytetään samoja väitteitä, joita olemme johtaneet siihen.
Oletetaan, että meillä on suorakaiteen muotoinen koordinaattijärjestelmä, joka sijaitsee kolmiulotteisessa tilassa. Se sisältää kaksi suoraa linjaa A ja B, jossa on risteyspiste m. Ohjausvektoreiden koordinaattien laskemiseksi meidän on tiedettävä näiden välittömien yhtälöiden. Merkitse ohjausvektorit A → \u003d (A X, A Y, Z) ja B → \u003d (B x, B Y, B Z). Voit laskea niiden välisen kulman kosinaa käyttämällä kaavaa:
cos α \u003d cos a →, b → ^ \u003d a →, b → a → · b → \u003d a x · b x + a y · b y + a z z z z 2 + a z 2 + a z 2 z 2 · b x 2 + b Y 2 + B Z2
Löydät itsessään kulman, tarvitsemme tämän kaavan:
α \u003d R C COS A X · B X + A Y · B Y + A Z · B Z A X2 + A Y2 + A Z 2 · B x 2 + B Y 2 + B Z2
Esimerkki 5.
Meillä on suora viiva, joka annetaan kolmiulotteisessa tilassa yhtälöllä x 1 \u003d Y - 3 \u003d Z + 3 - 2. Tiedetään, että se leikkaa O Z-akselin kanssa. Laske tämän kulman risteyksestä ja kosinasta.
Päätös
Merkitsevät kulmaa, joka on laskettava, kirjain α. Kirjoitamme ohjausvektorin koordinaatit ensimmäiselle suoralle - A → \u003d (1, - 3, - 2). Appliqué-akselille voimme ottaa koordinaattivektorin k → \u003d (0, 0, 1) oppaana. Saimme tarvittavat tiedot ja saimme lisätä ne haluttuun kaavaan:
cos α \u003d cos a →, k → ^ \u003d a →, k → a → · k → \u003d 1 · 0 - 3 · 0 - 2 · 1 1 2 + (- 3) 2 + (- 2) 2 · 0 2 + 0 2 + 1 2 \u003d 2 8 \u003d 1 2
Tämän seurauksena saimme, että tarvitsemme kulman, joka on yhtä suuri kuin R C COS 1 2 \u003d 45 °.
Vastaus: Cos α \u003d 1 2, α \u003d 45 °.
Jos havaitset virheen tekstissä, valitse se ja paina Ctrl + Enter
Kulma Suoraan avaruudessa kutsumme minkä tahansa vierekkäisen kulman, joka on muodostettu kahdesta suorasta, suoritetaan mielivaltaisen pisteen kanssa yhdensuuntaisesti datan kanssa.
Anna kaksi suoraa linjaa avaruudessa:
Ilmeisesti kulman takana φ suoraan voidaan ottaa kulma ohjausvektoreidensa ja. Koska kaavan mukaan kosin kulma vektoreiden välillä
Kahden suoran viivan rinnakkaisuuden ja kohtisuoran olosuhteet vastaavat niiden ohjausvektoreiden rinnakkaisuutta ja kohtisuoraan ja:
Kaksi suoraa rinnakkain Sitten ja vain, jos niiden omat kertoimet ovat suhteellisia, ts. l. 1 rinnakkain l. 2 Jos ja vain silloin, kun rinnakkain ![]() .
.
Kaksi suoraa kohtisuora Sitten ja vain silloin, kun vastaavien kertoimien teosten määrä on nolla :.
W. tavoite suoran ja tason välillä
Päästää suoraan d. - Ei kohtisuorassa tasossa θ;
d.'- Projection Direct d. tasossa θ;
Pienimmät kulmat suoran d. ja d.'Kutsumme kulma suoran ja tason välillä.
Merkitse se φ \u003d ( d.,θ)
Jos d.⊥θ, sitten ( d., θ) \u003d π / 2

Oi.→j.→k.→ Suorakulmainen koordinaattijärjestelmä.
Plane-yhtälö:
θ: KIRVES.+Mennessä+CZ.+D.=0
Uskomme, että suora määritellään piste- ja ohjausvektori: d.[M.0,p.→]
Vektori n.→(A.,B.,C.)⊥θ
Sitten on vielä selvittää vektorien välinen kulma. n.→ I. p.→, merkitse se γ \u003d ( n.→,p.→).
Jos kulma γ.<π/2 , то искомый угол φ=π/2−γ .
Jos kulma γ\u003e π / 2, haluttu kulma φ \u003d γ-π / 2
sinφ \u003d sin (2π-γ) \u003d cosy
sinφ \u003d sin (γ-2π) \u003d - COSγ
Sitten, kulma suoran ja tason välillävoidaan harkita kaava:
sinφ \u003d | cosγ | \u003d | | Ap.1+Bp.2+Cp.3∣ ∣ √A.2+B.2+C.2√p.21+p.22+p.23
Kysymys29. Kvardraattisen muodon käsite. Nelikulkujen yksilöllisyys.
Quadratic Form J (x 1, x 2, ..., x n) n kelvolliset muuttujat x 1, x 2, ..., x n kutsutaan tyypin summaksi 
 , (1)
, (1)
missä iJ. - Jotkut numerot nimeltään kertoimet. Rajoittamatta yleisyyttä, voimme olettaa sen iJ. = ji..
Kvardraattinen muoto kutsutaan pätevä jos iJ.
Î gr. Quadraattisen muodon matriisi Kutsutaan matriisi, joka koostuu kertoimista. Quadratic Form (1) vastaa yhtä symmetristä matriikkaa  Tuo on Ja t \u003d a. Näin ollen kvadraattinen muoto (1) voidaan tallentaa matriisimuodossa J ( h.) = x t ahmissä x T. = (h. 1 h. 2 … x N.). (2)
Tuo on Ja t \u003d a. Näin ollen kvadraattinen muoto (1) voidaan tallentaa matriisimuodossa J ( h.) = x t ahmissä x T. = (h. 1 h. 2 … x N.). (2)
Ja päinvastoin jokainen symmetrinen matriisi (2) vastaa yhtä kvadraattista muotoa tarkkuudella muuttujien nimeämiseen.
Sijoitus Quadratic Form He kutsuvat matriisinsa sijoitusta. Kvardraattinen muoto kutsutaan nondegeneroitua Jos nondegenerate on sen matriisi MUTTA. (Muista, että matriisi MUTTA Sitä kutsutaan nondegenerateiksi, jos sen determinantti ei ole nolla). Muussa tapauksessa kvadraattinen muoto on rappeutua.
positiivisesti määritelty (tai tiukasti positiivinen), jos
j ( h.) > 0 , kenelle tahansa h. = (h. 1 , h. 2 , …, x N.), sitä paitsi h. = (0, 0, …, 0).
Matriisi MUTTA positiivisesti määritelty Quadratic muoto j ( h.) Sitä kutsutaan myös positiivisesti. Siksi positiivisesti määritelty kvadraattinen muoto vastaa yhtä positiivisesti määriteltyä matriisia ja päinvastoin.
Kvardraattinen muoto (1) on kutsuttu negatiivisesti määritelty (tai ehdottomasti negatiivinen), jos
j ( h.) < 0, для любого h. = (h. 1 , h. 2 , …, x N.), Sitä paitsi h. = (0, 0, …, 0).
Samoin kuten edellä, on myös määritelty negatiivisesti määriteltyä quad ratratich -muotoa matriisi.
Siksi positiivinen (negatiivinen) tietty Quada-Tick-lomake J ( h.) saavuttaa vähintään (maksimi) arvo j ( x *) \u003d 0 kun x * = (0, 0, …, 0).
On huomattava, että suurin osa kvadraattisista muodoista ei ole erillään, eli ne eivät ole positiivisia eikä negatiivisia. Tällaiset kvadraattiset muodot valittavat 0: een ei pelkästään koordinaattijärjestelmän alussa myös muissa kohdissa.
Kun n. \u003e 2 edellyttää erityisiä kriteerejä kvadraattisen muodon määritelmän tarkistamiseksi. Harkitse niitä.
Tärkeimmät kaivostyöläiset Quadratic-muotoa kutsutaan alaikäisille:


eli tämä on alaikäisiä noin 1, 2, ..., n. Matrilasia MUTTASijaitsee vasemmassa yläkulmassa, viimeinen niistä vastaa matriisin determinantin kanssa MUTTA.
Kriteeri positiiviselle varmuudelle (Sylvester-kriteeri)
h.) = x t ah Se oli positiivisesti määritelty, se on tarpeen ja tarpeeksi, että kaikki matriisin suuret alaikäiset MUTTA olivat positiivisia, eli: M. 1 > 0, M. 2 > 0, …, M N. > 0. Negatiivisen varmuuden kriteeri Jotta Quadratic J ( h.) = x t ah Se oli välttämätöntä negatiiviseksi, on välttämätöntä ja tarpeeksi sen tärkeimmille alaikäisille, että jopa tilaus on positiivinen, ja pariton - negatiivinen, toisin sanoen: M. 1 < 0, M. 2 > 0, M. 3 < 0, …, (–1) N.
Ohje
merkintä
Tangonentin trigonometrisen funktion aika on 180 astetta, mikä tarkoittaa, että suoran rinteiden kulmat eivät voi moduulissa ylittää tämän arvon.
Hyödyllisiä neuvoja
Jos kulmakertoimet ovat keskenään, tällaisen suoran välinen kulma on niin suorana tai samanaikaisesti tai yhdensuuntaisesti.
Määritä kulmakulman suuruus, joka on suora (yksi niistä), on välttämätöntä siirtämään uuteen asentoon rinnakkaisen siirron avulla risteyksessä. Sen jälkeen sinun pitäisi löytää kulman arvo tuloksena olevan leikkauksen välissä.

Tarvitset
- Sääntö, suorakulmainen kolmio, kynä, kuljetus.
Ohje
Joten, anna vektori V \u003d (A, B, C) ja taso ja X + Y + C Z \u003d 0, jossa A, B ja C - normaalin N. koordinaatit, sitten kulman a kosine välillä Vektorit V ja N ovat: Cos α \u003d (A + BB + C C) / (√ (a ² + b 2 + c²) √ (A ² + C² + C²)).
Lasketaan kulman suuruus asteina tai radialaisina, sinun on laskettava toiminto takaisin kosiniin, ts. Arkkosinus: a \u003d arssos (A + BB + C) / (√ (A2 + B 2 C²) √ (A2 + C² + C²))).
Esimerkki: Etsi kulma välillä vektori (5, -3, 8) ja koneYleinen yhtälö 2 x - 5 Y + 3 Z \u003d 0. Areating: Kirjoita tason N \u003d (2, -5, 3) normaalin vektorin koordinaatit. Suurennetaan kaikki tunnetut arvot tuloksena olevaan kaavaan: cos α \u003d (10 + 15 + 24) / √3724 ≈ 0,8 → α \u003d 36,87 °.
Video aiheesta
Suora viiva, jolla on ympyrä Yksi yleinen kohta on kehän tangentti. Toinen Tangentin erityispiirre - on aina kohtisuorassa sädettä kosketukseen, eli tangentti ja säde muodostaa suoraan kulma. Jos ympyrän AB: lle ja AC: lle on kaksi tangenttia, niin ne ovat aina yhtä kuin toisilleen. Tangenttien välisen kulman määrittäminen ( kulma ABC) suoritetaan käyttämällä pythagorean teoremia.

Ohje
Kulman määrittämiseksi on välttämätöntä tietää käyttöjärjestelmän ja käyttöjärjestelmän kehän säde ja ympyrän keskellä olevan aloituspisteen etäisyys, AVO ja ASO kulmat ovat yhtä suuret, säde Esimerkki, 10 cm ja etäisyys JSC: n ympyrän keskipisteeseen. \u003d 125;
Aion olla lyhyt. Kahden suoran välinen kulma on yhtä suuri kuin niiden ohjausvektoreiden välinen kulma. Näin ollen, jos onnistut löytämään ohjausvektoreiden a \u003d (x 1; y 1; z 1) ja b \u003d (x 2; y 2; z 2) koordinaatit, niin löydät kulman. Tarkemmin sanottuna kulman kosinaa kaavalla:
Katsotaanpa, miten tämä kaava toimii tietyissä esimerkeissä:
Tehtävä. Kuubassa ABCDA: ssa 1 B 1 C 1 D1, Pisteet E ja F ovat keskellä kylkiluita A1 B1 ja B 1 C1 vastaavasti. Etsi kulma suorien AE: n ja BF: n välillä.

Koska kuution reunaa ei ole määritelty, laitamme ab \u003d 1. Esitämme standardin koordinaattijärjestelmä: Aloita kohdalla A, X, Y-akseli, lähetä vastaavasti AB, AD ja AA 1. Yksi segmentti on AB \u003d 1. Nyt löydämme ohjausvektoreiden koordinaatit suoriin viivoihin.
Löydämme AE-vektorin koordinaatit. Tätä varten tarvitsemme pisteitä A \u003d (0; 0; 0) ja E \u003d (0,5, 0; 1). Koska e kohta se on segmentin keskellä A 1 B 1, sen koordinaatit ovat yhtä suuria kuin päiden keskimääräiset aritmeettiset koordinaatit. Huomaa, että vektori AE: n alku vastaa koordinaattien alkua, joten AE \u003d (0,5; 0; 1).
Nyt käsittelemme BF-vektoria. Samoin me purkamme pisteitä b \u003d (1; 0; 0) ja f \u003d (1; 0,5; 1), koska F - segmentin puolivälin B 1 C 1. Meillä on:
Bf \u003d (1 - 1; 0,5 - 0; 1 - 0) \u003d (0; 0,5; 1).
Joten ohjausvektorit ovat valmiita. Suoran kulman kosini on ohjausvektoreiden välisen kulman kosini, joten meillä on:
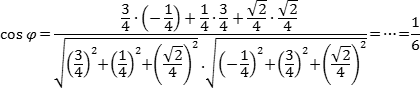
Tehtävä. ABCA: n 1 B 1 C 1 oikeassa tricoral prismisessa kaikki ovat 1, jotka ovat 1, pisteitä D ja E on merkitty kylkiluut A 1 B 1 ja B1C1, vastaavasti. Etsi kulma suoran mainoksen ja olla.
Esittelemme standardin koordinaattijärjestelmä: alkuperän A, X-akseli ohjaa AB, Z pitkin AA 1: tä. Y-akseli lähettää niin, että oksi taso on samansuuntainen ABC-tason kanssa. Yksi segmentti on AB \u003d 1. Etsi ohjausvektoreiden koordinaatit halutulle suoralle.
Aluksi löydämme mainosvektorin koordinaatit. Harkitse pisteitä: a \u003d (0; 0; 0) ja d \u003d (0,5, 0; 1), koska D on segmentin keskellä 1 b 1. Mainosvektorin alusta lähtien saamme mainos \u003d (0,5, 0; 1).
Nyt löydämme vektorin koordinaatit. Piste b \u003d (1; 0; 0) sitä pidetään helppoa. E - segmentin C 1 B 1 keskellä - hieman monimutkaisempi. Meillä on:
Se on edelleen löytää kosinkulma:

Tehtävä. Oikean kuusikulmion palkinnon ABCDEFA 1 B 1 C 1 D 1 E1F 1, kaikki reunat, joiden reunat ovat 1, piste K ja l ovat vastaavasti kylkiluut A 1 B 1 ja B1C1. Etsi kulma suorien AK: n ja BL: n välillä.

Esittelemme PRISM: n standardin koordinaattijärjestelmän: koordinaattien alku sijoitetaan alemman pohjan keskelle, X-akseli ohjaa FC: tä akselin Y - AB: n ja DE: n segmenttien keskellä ja Z-akseli on pystysuunnassa ylöspäin. Yksi leikkaus on jälleen yhtä suuri kuin AB \u003d 1. Kirjoitamme meille kiinnostuksen koordinaatit:
Pisteet k ja l ovat segmenttien keskiosaa 1 B 1 ja B 1 C1, joten niiden koordinaatit ovat aritmeettisen keskiarvon läpi. Tietäen pisteitä, löydämme ohjausvektorin AK: n koordinaatit:
Nyt löydämme nurkan kosinaa:

Tehtävä. Oikeassa kvadrangular SABCD-pyramidissa kaikki kylkiluut ovat 1, kohdat E ja F ovat vastaavasti SB: n ja SC: n sivujen keskellä. Etsi kulma suorien AE: n ja BF: n välillä.
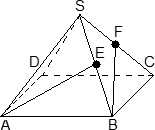
Esittelemme standardin koordinaattijärjestelmä: Aloita kohdassa A, X ja Y-akseli lähetetään pitkin AB: tä ja mainosta vastaavasti ja Z-akseli ohjaa pystysuoraan. Yksi segmentti on AB \u003d 1.
Pisteet E ja F - SB: n ja SC-segmenttien keskipitkät, joten niiden koordinaatit sijaitsevat päiden aritmeettisena keskiarvona. Me kirjoitamme meille kiinnostuksen koordinaatit:
A \u003d (0; 0; 0); B \u003d (1; 0; 0)
Tietäen pisteitä, löydämme ohjausvektorin AE ja BF: n koordinaatit:
AE-vektorin koordinaatit ovat samansuuntaisia \u200b\u200bkoordinaatteja E: n E, koska kohta A on koordinaattien alku. Se on edelleen löytää kosinkulma: